Simluation
WARNING THIS IS A WORK IN PROGRESS
We made a 2D simulation of the game back in 2020 for use in testing out new strategies, some of which have actually been materialised into our actual program.
About it
The simulation is made using Python, with the Arcade library for sprite drawing and game graphics, and the Pymunk library for calulating the 2D physics.
TO PUT MORE DESC
Future strategy ideas
The benefit of using a simulation is that we can get access to information that we haven’t been able to physically deduced yet.
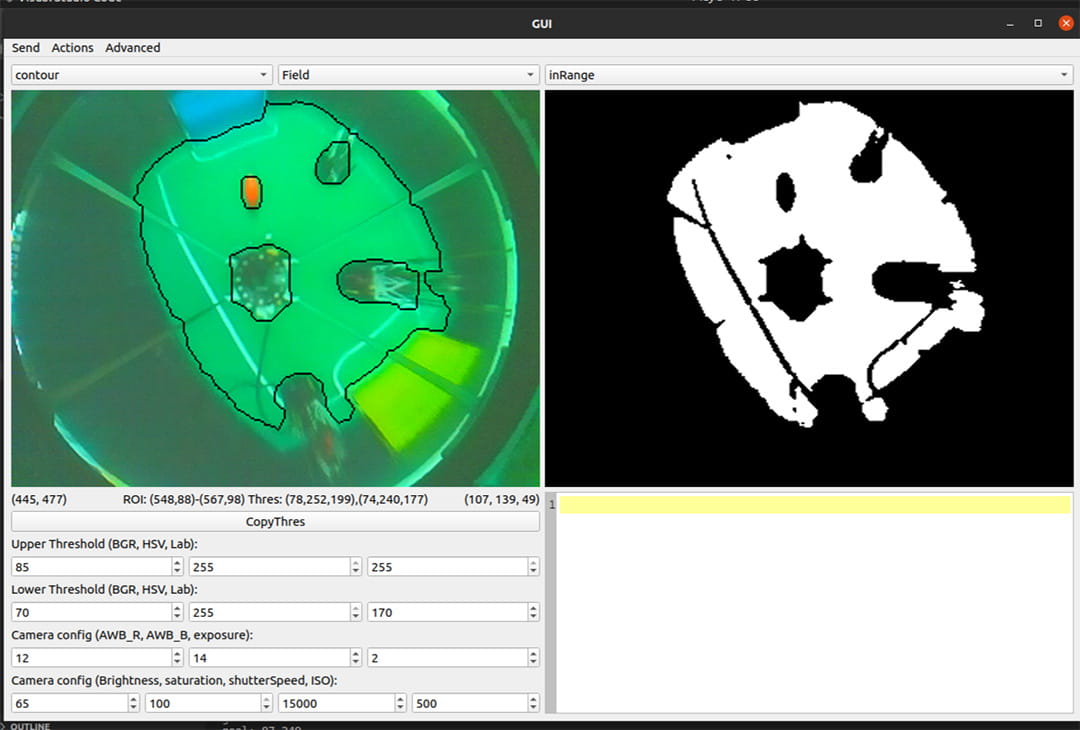
One example would be knowledge of the opponent robot’s location. While theoretically possible to know by using some combination of detecting the field and eliminating the negative areas (see picture below) as well as distance sensors to verify the positions, it is understandably extremely hard to get this working accurately in real life.
Nonetheless, the opponent’s robot location is extremely useful information which could introduce more advanced strategies such as blocking the offensive robot from the ball. Hence, the simulation allows us to have an insight into how those strategies would pan out and perhaps see whether it’s worth it to try actually implementing it in the future.
Instagram highlights of our simulation program: https://www.instagram.com/stories/highlights/17910837451404256/
TO INCLUDE SUPER TOP SECRET ADVANCED STRATS WHEN tHe TiMe Is RiGhT